Động cơ bước trở thành lựa chọn lý tưởng cho các hệ thống tự động hóa yêu cầu kiểm soát tốc độ chính xác hoặc định vị chính xác…trong thời gian gần đây là do khả năng kết hợp với các thiết bị điều khiển như máy tính PC,… đem đến những hiệu quả và tối ưu chi phí.
Vậy động cơ bước là gì? Chúng ta cùng tìm hiểu nhé!
Động cơ bước là gì?
Động cơ bước là một thiết bị cơ điện không chổi than, chuyển đổi các chuỗi xung điện tại các cuộn kích của chúng thành trục quay cơ học. Từng bước quay được xác định chính xác. Trục của động cơ quay qua một góc cố định cho mỗi xung rời rạc. Chuyển động này có thể là tuyến tính hoặc góc.
Nguyên lý hoạt động của động cơ bước
Khi một chuỗi xung được gửi, động cơ sẽ bước theo xung. Góc mà trục động cơ bước quay cho mỗi xung được gọi là góc bước, thường được biểu thị bằng độ.

Số lượng xung đầu vào được cấp cho động cơ quyết định góc bước và do đó vị trí của trục động cơ được điều khiển bằng cách điều khiển số lượng xung. Tính năng độc đáo này làm cho động cơ bước rất phù hợp với hệ thống điều khiển vòng hở trong đó vị trí chính xác của trục được duy trì với số xung chính xác mà không cần sử dụng cảm biến phản hồi.
Nếu góc bước càng nhỏ thì số bước trên mỗi vòng quay càng lớn và độ chính xác của vị trí thu được càng lớn. Các góc bước có thể lớn tới 90 độ và nhỏ đến 0,72 độ, tuy nhiên, trong thực tế các góc bước thường được sử dụng là 1,8 độ, 2,5 độ, 7,5 độ và 15 độ.
Hướng quay của trục phụ thuộc vào chuỗi xung áp dụng cho stato. Tốc độ của trục hoặc tốc độ động cơ trung bình tỷ lệ thuận với tần số (tốc độ của xung đầu vào) của các xung đầu vào được áp dụng tại các cuộn kích. Do đó, nếu tần số thấp, động cơ bước quay theo các bước và đối với tần số cao, nó liên tục quay như động cơ DC do quán tính.
Cấu tạo cơ bản của động cơ bước
Giống như tất cả các động cơ điện, động cơ bước có cấu tạo gồm stato và rôto. Rôto là bộ phận có thể di chuyển không có cuộn dây, chổi than và cổ góp. Thông thường các rôto là loại nam châm điện hoặc loại nam châm vĩnh cửu.
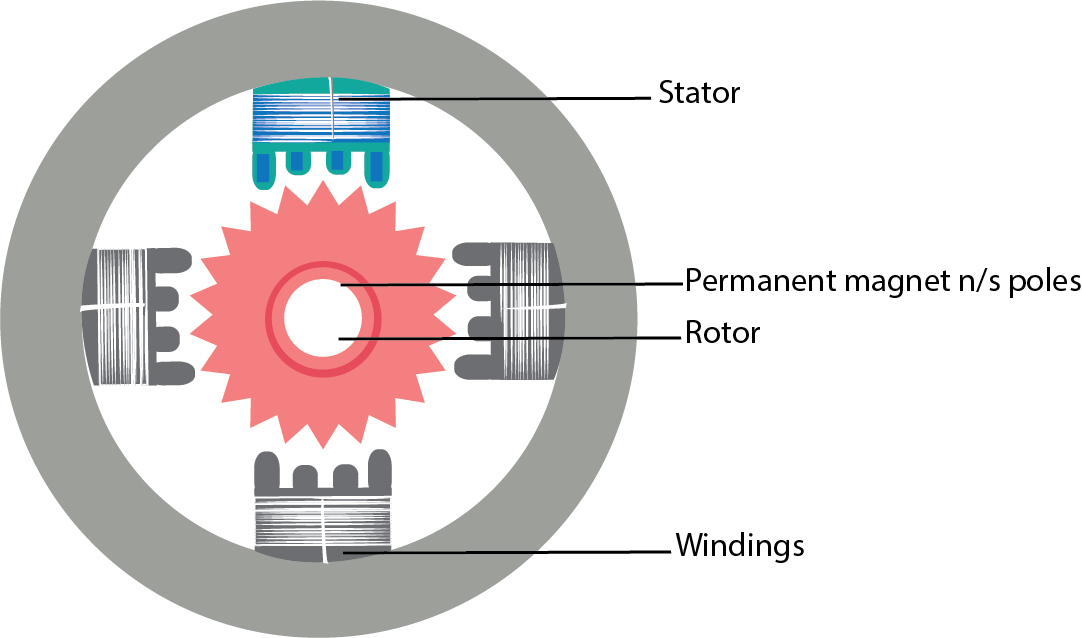
Stator thường được chế tạo với các cuộn dây đa cực và đa pha, thường là ba hoặc bốn cuộn dây pha cho một số cực cần thiết được quyết định bởi sự dịch chuyển góc mong muốn trên mỗi xung đầu vào.
Không giống như các động cơ khác, động cơ bước hoạt động trên một xung điều khiển rời rạc được lập trình cho cuộn dây stato thông qua một bộ điều khiển điện tử. Động cơ quay do sự tương tác từ tính giữa các cực của cuộn dây stato được cấp năng lượng tuần tự và các cực của rôto.
Các loại động cơ bước
Động cơ bước có 3 loại cơ bản, cụ thể là
- Động cơ bước nam châm vĩnh cửu
- Động cơ bước biến đổi điện trở
- Động cơ bước lai
Động cơ bước biến đổi từ trở
Đây là loại động cơ bước cơ bản đã tồn tại trong một thời gian dài. Như tên cho thấy, vị trí góc của rôto phụ thuộc vào từ trở của mạch từ được hình thành giữa các cực của stato và rôto
Cấu tạo động cơ bước biến đổi từ trở
Nó bao gồm một stato dây quấn và một rôto bằng lá sắt mềm. Stato có một chồng các lớp thép silicon, trên đó có các cuộn dây quấn. Thông thường, nó là dây quấn cho ba giai đoạn được chia giữa các cặp cực.
Do đó, số cực trên stato được hình thành bằng bội số chẵn của số pha mà cuộn dây quấn trên stato. Trong hình bên dưới, stato có 12 cực chia cách đều nhau trong đó mỗi cực được quấn bằng một cuộn dây. Ba pha này được cung cấp năng lượng từ nguồn DC.
Rôto không có cuộn dây và thuộc loại cực nổi được làm hoàn toàn bằng các tấm thép có rãnh. Các răng cực quay của rôto có chiều rộng tương đương với răng stato. Số cực trên stato khác với số cực của rôto, cung cấp khả năng tự khởi động và quay hai chiều của động cơ.
Mối quan hệ của các cực rôto với các cực của stato đối với động cơ bước ba pha được đưa ra là,
Nr = Ns ± (Ns / q)
Ở đây Ns = 12, và q = 3,
và do đó Nr = 12 ± (12/3) = 16 hoặc 8.
Nguyên lý của động cơ bước biến đổi từ trở
Động cơ bước hoạt động theo nguyên tắc rôto thẳng hàng ở một vị trí cụ thể với đầu của cực kích trong một mạch từ trong đó tồn tại từ trở tối thiểu. Bất cứ khi nào nguồn được cấp cho động cơ và bằng cách kích một cuộn dây cụ thể, nó sẽ tạo ra từ trường của nó và khuếch tán các cực từ của chính nó.
Do từ tính còn lại trong các cực nam châm của rôto, nó sẽ làm cho rôto di chuyển ở vị trí như vậy để đạt được vị trí tối thiểu và do đó một bộ cực của rôto thẳng hàng với bộ cực của stato. Tại vị trí này, trục của từ trường stato khớp với trục đi qua hai cực từ bất kỳ của rôto.
Khi rôto thẳng hàng với các cực của stato, nó có đủ lực từ để giữ cho trục chuyển sang vị trí tiếp theo, theo chiều kim đồng hồ hoặc ngược chiều kim đồng hồ.
Góc bước có thể được giảm thêm bằng cách tăng số cực trên stato và rôto, trong trường hợp như vậy, động cơ thường được quấn với cuộn dây pha bổ sung. Điều này cũng có thể đạt được bằng cách áp dụng các cấu trúc động cơ bước khác nhau như cơ cấu bánh răng đa cấp và cơ cấu giảm tốc.
Động cơ bước nam châm vĩnh cửu
Động cơ bước dạng này được thiết kế nam châm vĩnh cửu. Là dạng phổ biến nhất trong số các loại động cơ bước. Như tên của nó, nó thêm nam châm vĩnh cửu vào việc chế tạo động cơ. Ưu điểm chính của động cơ này là chi phí sản xuất thấp. Loại động cơ này có 48-24 bước trên mỗi vòng quay.
Cấu tạo động cơ nam châm vĩnh cửu
Trong động cơ này, stato là đa cực và cấu tạo của nó tương tự như động cơ bước biến đổi từ trở như đã thảo luận ở trên. Nó bao gồm các fe có rãnh trên đó cuộn dây stato được quấn. Trong đó các cuộn dây quấn có thể là hai hoặc ba hoặc bốn pha.
Các đầu cuối của tất cả các cuộn dây này được nối với đầu kích DC thông qua các công tắc trạng thái trong mạch truyền động.
Rôto được tạo thành từ một vật liệu nam châm vĩnh cửu có thể có dạng hình trụ hoặc cực lồi, nhưng thường là loại hình trụ trơn. Rôto được thiết kế để có số cực từ chẵn với các cực Bắc và Nam xen kẽ.
Hoạt động của động cơ bước nam châm vĩnh cửu
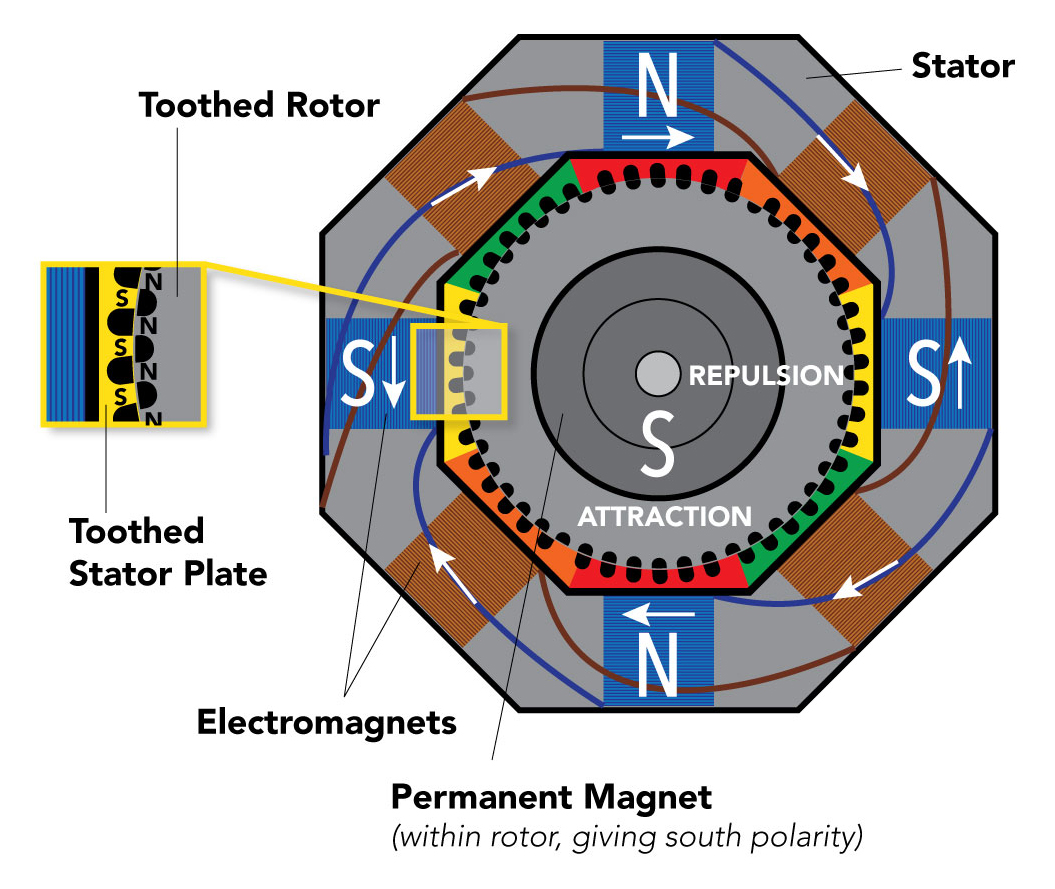
Động cơ bước này hoạt động theo nguyên tắc các cực khác nhau thì thu hút nhau và các cực giống nhau thì đẩy nhau. Khi cuộn dây stato được kích với nguồn cấp DC, nó sẽ tạo ra từ thông và thiết lập các cực Bắc và Nam. Do lực hút và lực đẩy giữa các cực rôto nam châm vĩnh cửu và các cực của stato, rôto bắt đầu di chuyển lên đến vị trí mà các xung được tạo cho stato.
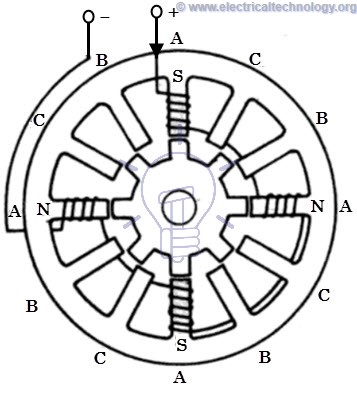
Ví dụ như hình:
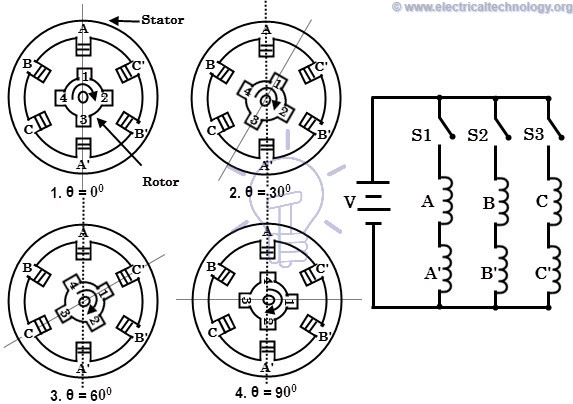
Khi pha A được cấp nguồn dương với điểm A’ , các cuộn dây sẽ thiết lập các cực Bắc và Nam. Do lực hút, các cực của rôto thẳng hàng với các cực của stato.
Khi dòng kích được chuyển sang pha B và tắt pha A, rôto sẽ điều chỉnh thêm theo trục từ của pha B, và do đó quay qua 90 độ theo chiều kim đồng hồ.
Tiếp theo, nếu pha A được cấp nguồn với dòng điện âm đối với A’, thì sự hình thành các cực của stato làm cho rôto di chuyển qua 90 độ khác theo chiều kim đồng hồ.
Theo cách tương tự, nếu pha B bị kích với dòng âm bằng cách đóng công tắc pha A, rôto quay qua 90 độ khác theo cùng một hướng. Tiếp theo, nếu pha A được kích thích với dòng điện dương, rôto đến vị trí ban đầu, do đó tạo ra một vòng quay hoàn chỉnh 360 độ. Điều này cho thấy, bất cứ khi nào stato bị kích thích, rôto có xu hướng xoay qua 90 độ theo chiều kim đồng hồ.
Động cơ bước lai
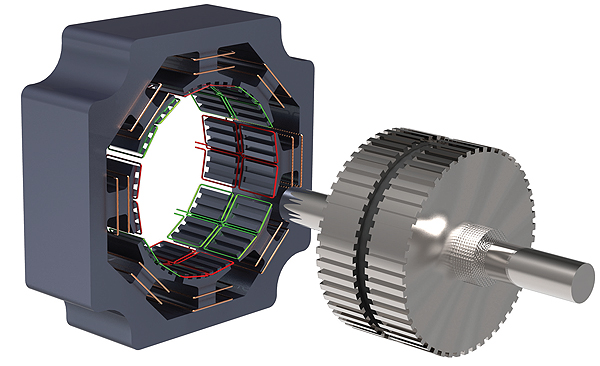
Đây là loại động cơ bước phổ biến nhất vì nó cung cấp hiệu suất tốt hơn so với rôto nam châm vĩnh cửu về độ phân giải bước, giữ mô-men xoắn và tốc độ. Tuy nhiên, những động cơ này đắt hơn động cơ bước nam châm vĩnh cửu. Nó kết hợp các tính năng tốt nhất của cả hai động cơ bước nam châm vĩnh cửu và biến đổi từ trở. Những động cơ này được sử dụng trong các ứng dụng đòi hỏi góc bước rất nhỏ như 1,5, 1,8 và 2,5 độ.
Động cơ bước đơn cực và lưỡng cực
Các động cơ bước được thảo luận ở trên có thể là đơn cực hoặc lưỡng cực dựa trên sự sắp xếp cuộn dây. Một động cơ bước đơn cực được sử dụng với hai cuộn dây mỗi pha và do đó hướng của dòng chảy qua các cuộn dây này làm thay đổi vòng quay của động cơ. Trong cấu tạo này, dòng điện đi qua một hướng trong một cuộn dây và ngược chiều trong một cuộn dây khác.
Hình dưới đây cho thấy động cơ bước đơn cực 2 pha trong đó cuộn A và C dành cho một pha và B và D dành cho pha khác. Trong mỗi pha, mỗi cuộn dây mang dòng điện ngược chiều với cuộn dây khác. Chỉ có một cuộn dây sẽ mang dòng điện tại một thời điểm trong mỗi pha để đạt được hướng quay cụ thể. Vì vậy, chỉ bằng cách chuyển đổi các cực sang từng cuộn dây, hướng quay được kiểm soát.
Trong trường hợp động cơ bước lưỡng cực, mỗi pha bao gồm một cuộn dây chứ không phải hai trong trường hợp một cực đơn. Trong đó, hướng quay được điều khiển bằng cách đảo ngược dòng điện qua cuộn dây. Do đó, nó đòi hỏi một mạch điều khiển phức tạp để đảo ngược hiện tại.
Các chế độ bước của động cơ bước
Mỗi bước của động cơ thì tương ứng với một xung được cấp vào cuộn dây của động cơ. Do đó, chế độ bước của động cơ sẽ khác nhau tuỳ thuộc vào nguồn năng lượng cấp cho động cơ. Sau đây là các chế độ vận hành hoặc điều khiển phổ biến nhất của động cơ bước.
- Bước dạng sóng
- Bước toàn phần
- Bước 1/2
- Bước siêu mịn
Chế độ bước dạng sóng
Chế độ bước dạng sóng là đơn giản nhất trong tất cả các chế độ khác, trong đó chỉ có một cuộn dây được cấp năng lượng tại bất kỳ thời điểm nào. Mỗi cuộn dây của pha được nối với nguồn thay thế. Bảng dưới đây cho thấy thứ tự mà các cuộn dây được cấp năng lượng trong động cơ bước 4 pha.
Trong chế độ này, động cơ cho góc bước tối đa so với tất cả các chế độ khác. Đây là chế độ đơn giản nhất và được sử dụng phổ biến nhất cho bước; tuy nhiên mô-men xoắn được tạo ra ít hơn vì nó sử dụng một phần của toàn bộ cuộn dây tại một thời điểm nhất định.
Chế độ bước toàn phần
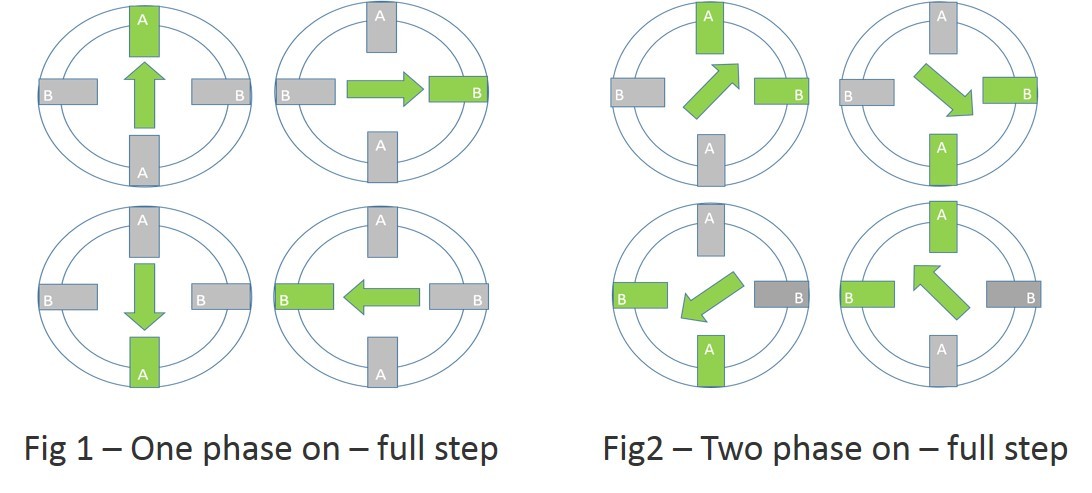
Trong chế độ này, hai pha stato được cấp năng lượng đồng thời tại bất kỳ thời điểm nào. Khi hai pha được cấp năng lượng cùng nhau; rôto sẽ trải qua mô-men xoắn từ cả hai pha và đến vị trí cân bằng, sẽ được xen kẽ giữa hai vị trí bước sóng liền kề hoặc kích 1 pha. Vì vậy,chế độ này cung cấp mô-men giữ tốt hơn bước dạng sóng. Bảng bên dưới hiển thị ổ đĩa đầy đủ cho động cơ bước 4 pha.
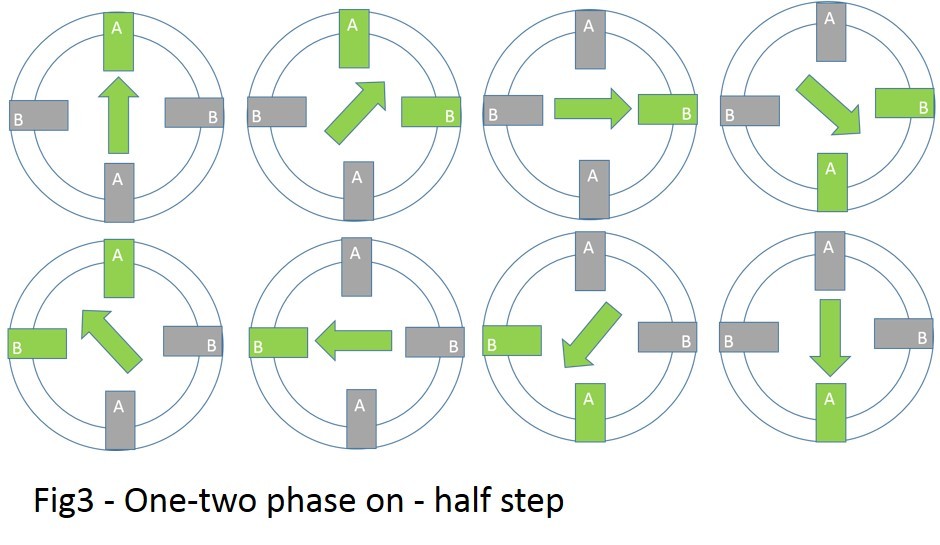
Chế độ bước 1/2
Đây là sự kết hợp của cả chế độ bước sóng và bước toàn phần. Trong đó, các kích dòng một pha và hai pha được thực hiện xen kẽ; tức là, một pha ON, hai pha ON, … Góc bước trong chế độ này trở thành một nửa của góc bước toàn phần. Chế độ điều khiển này có mô-men xoắn cao nhất và ổn định so với tất cả các chế độ khác. Tham khảo bảng dưới đây.
Chế độ bước siêu mịn
Trong chế độ này, mỗi bước động cơ được chia thành nhiều bước nhỏ, thậm chí hàng trăm vị trí cố định, do đó thu được độ phân giải định vị lớn hơn. Trong đó, dòng điện qua các cuộn dây được thay đổi liên tục để có được các bước rất nhỏ. Trong đó, hai pha được kích thích đồng thời, nhưng với dòng điện không đều trong mỗi pha.
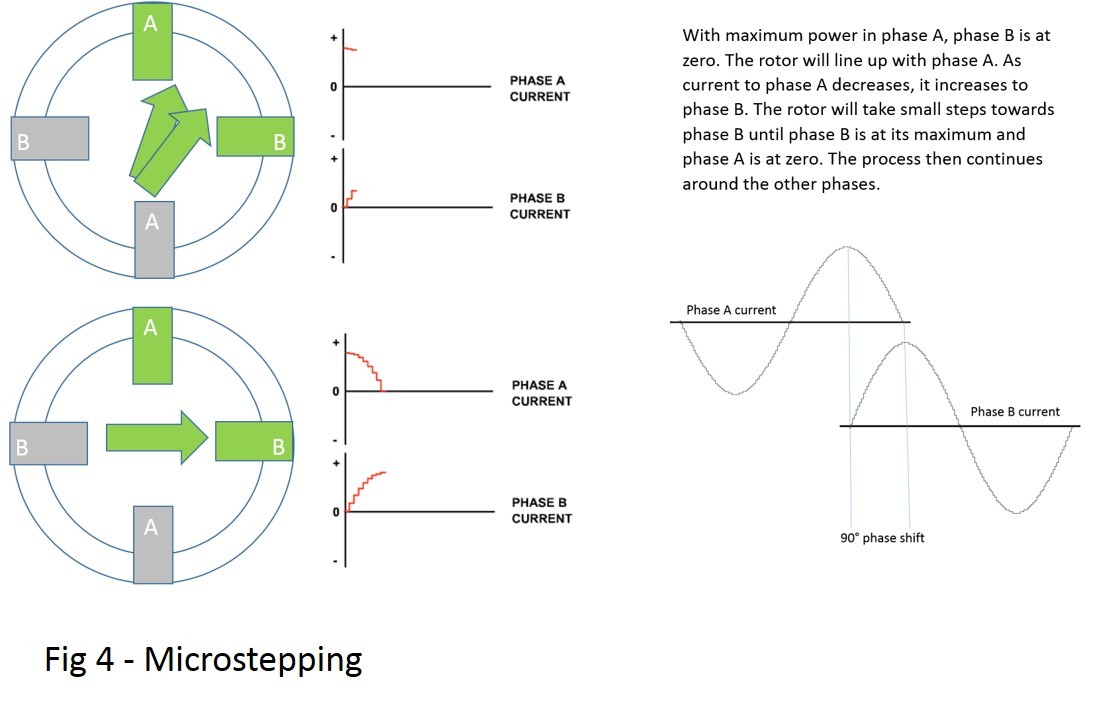
Ví dụ, dòng qua pha -1 được giữ cố định. Trong khi dòng qua pha 2 được tăng dần theo các bước; cho đến giá trị tối đa của dòng điện, cho dù đó là âm hay dương. Dòng điện trong pha 1 sau đó giảm hoặc tăng theo các bước cho đến không. Do đó, động cơ sẽ tạo ra một kích thước bước nhỏ.
Chế độ bước này có thể chạy bởi từng loại động cơ bước được thảo luận ở trên. Tuy nhiên, hướng của dòng điện trong mỗi cuộn dây trong chế độ điều khiển này; có thể thay đổi tùy thuộc vào loại động cơ và loại đơn cực hoặc lưỡng cực.
Ưu nhược điểm của động cơ bước
Ưu điểm của động cơ bước
- Ở vị trí đứng yên, động cơ có mô-men xoắn tốt.
- Phản ứng nhạy khi khởi động, dừng và đảo ngược vị trí.
- Tuổi thọ cao, bền bỉ do không có chổi than
- Góc quay của động cơ tỷ lệ thuận với tín hiệu đầu vào.
- Điều khiển vòng hở ít tốn
- Tốc độ động cơ tỷ lệ thuận với tần số xung đầu vào; có thể đạt được một phạm vi tốc độ quay rộng.
- Khi tải được ghép với trục, vẫn có thể nhận ra vòng quay đồng bộ với tốc độ thấp.
- Định vị chính xác và độ lặp lại của chuyển động là tốt
- Lỗi không được tích lũy từ bước này sang bước khác.
- Động cơ bước là an toàn hơn; và chi phí thấp (so với động cơ servo), có mô-men xoắn cao ở tốc độ thấp; độ tin cậy cao với cấu trúc đơn giản hoạt động ở mọi môi trường.
Nhược điểm của động cơ bước
- Động cơ bước có hiệu suất thấp.
- Nó có độ chính xác thấp chưa bằng với động cơ servo
- Mô-men xoắn của nó giảm rất nhanh với tốc độ.
- Vì động cơ bước hoạt động trong điều khiển vòng hở; không có phản hồi để chỉ ra các bước lỗi.
- Nó có mô-men xoắn thấp đến tỷ lệ quán tính cao
- Gây nhiều tiếng ồn khi hoạt động.
Các ứng dụng của động cơ bước
Như chúng ta đã biết; nhiều động cơ điện công nghiệp được sử dụng với điều khiển phản hồi vòng kín; để đạt được vị trí chính xác hoặc điều khiển tốc độ chính xác. Nhưng, động cơ bước có thể hoạt động trên bộ điều khiển vòng hở. Điều này giúp giảm tổng chi phí hệ thống; và đơn giản hóa thiết kế máy so với điều khiển hệ thống servo…
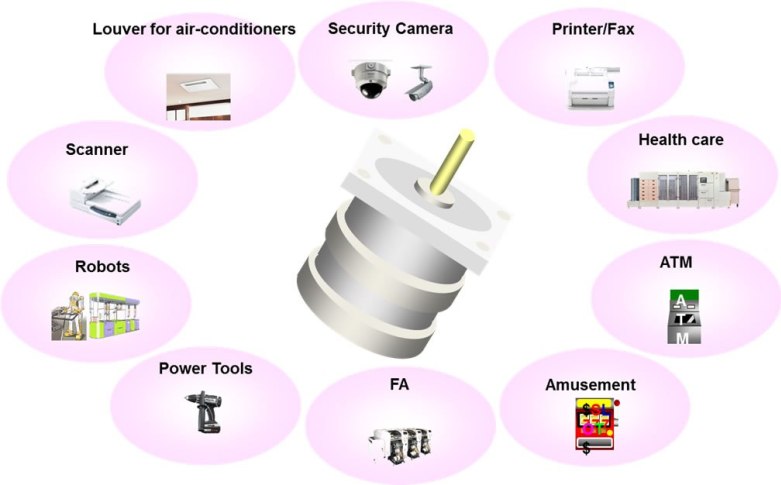
- Động cơ bước được sử dụng trong các thiết bị sản xuất tự động; và máy công nghiệp như đóng gói, dán nhãn, làm đầy và cắt, …
- Nó được sử dụng rộng rãi trong các thiết bị an ninh như camera an ninh & giám sát.
- Trong ngành y tế; động cơ bước được sử dụng rộng rãi trong các mẫu, chụp ảnh nha khoa kỹ thuật số; bơm chất lỏng, máy phân tích máu và máy quét y tế, …
- Chúng được sử dụng trong các thiết bị điện tử tiêu dùng trong máy scan, máy photocopy; máy in và trong máy ảnh kỹ thuật số để tự động thu phóng và lấy nét.
- Động cơ bước cũng được sử dụng trong thang máy, băng tải và chuyển hướng băng chuyền…
Các bạn có thể tìm hiểu thêm về các loại cảm biến; sử dụng trong công nghiệp như: cảm biến nhiệt độ; cảm biến siêu âm; cảm biến áp suất…
Lời kết
Bài viết này, mình đã cung cấp khá chi tiết; về tất cả những thông tin về động cơ bước như: cấu tạo, nguyên lý hoạt động; phân loại cũng như các ứng dụng của động cơ bước. Hy vọng qua nội dung này; sẽ đem đến một phần kiến thức đến với các bạn đang học về kỹ thuật.
Rất mong nhận được những góp ý của các bạn để bài viết hoàn thiện hơn!