Số lượng các phần tử được kết hợp với nhau, để tạo thành một hệ thống tạo ra đầu ra mong muốn được gọi là hệ thống điều khiển.
Đầu ra của bất kỳ hệ thống nào, được kiểm soát bởi hệ thống điều khiển. Bởi vì mỗi phần tử trong hệ thống này đều có ảnh hưởng đến đầu ra. Đôi khi, hệ thống điều khiển sử dụng một vòng phản hồi để có được sự ổn định & nhất quán của hệ thống để tạo ra đầu ra mong muốn.
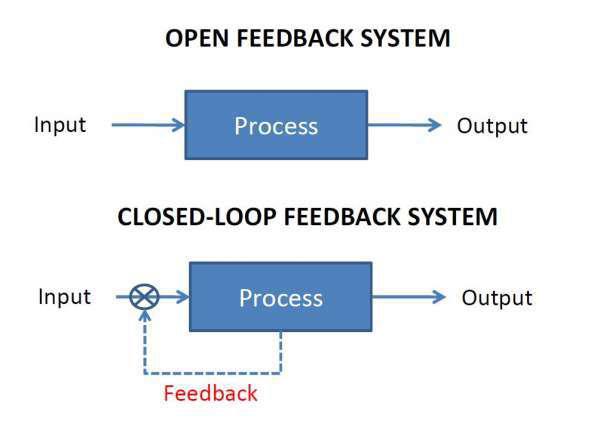
Ở đây, vòng hồi tiếp là một phần tử của tín hiệu đầu ra. Chúng rất cần thiết trong bất kỳ hệ thống điều khiển nào để có được sự ổn định đầu ra. Hệ thống điều khiển được phân thành hai loại dựa trên kết nối phản hồi là:
- Hệ thống điều khiển vòng kín
- Hệ thống điều khiển vòng hở
Hệ thống điều khiển vòng kín là gì?
Hệ thống điều khiển vòng kín có thể được định nghĩa là hệ thống có vòng phản hồi (hoặc) hệ thống điều khiển sử dụng tín hiệu phản hồi để tạo ra đầu ra. Sự ổn định của hệ thống này có thể được kiểm soát bởi một hệ thống phản hồi. Vì vậy, bằng cách xây dựng một hệ thống phản hồi, bất kỳ hệ thống điều khiển vòng hở nào cũng có thể được thay đổi thành vòng kín.
Sơ đồ khối
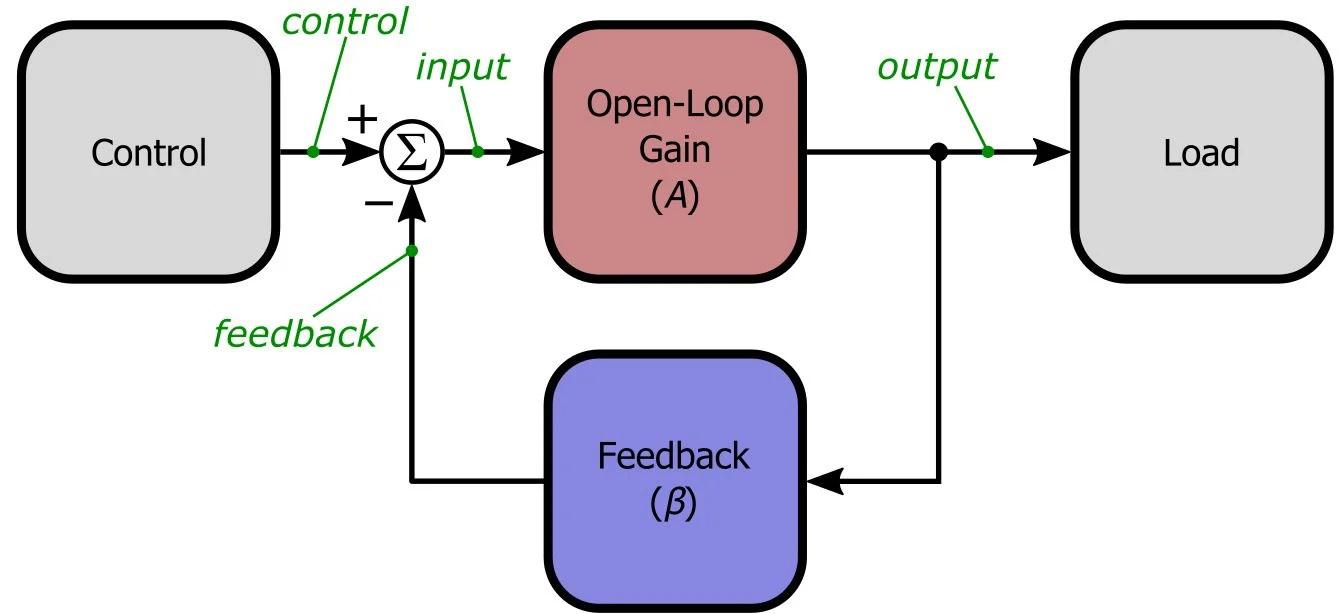
Sơ đồ khối của hệ thống vòng kín được hiển thị bên dưới. Các phần tử cơ bản của hệ thống điều khiển vòng kín bao gồm bộ phát hiện lỗi, bộ điều khiển, các phần tử phản hồi & bộ nguồn.
Hệ thống điều khiển bao gồm một vòng phản hồi, thì hệ thống được gọi là hệ thống điều khiển phản hồi. Vì vậy đầu ra có thể được kiểm soát chính xác bằng cách cung cấp phản hồi cho đầu vào. Loại hệ thống điều khiển này có thể bao gồm nhiều phản hồi.
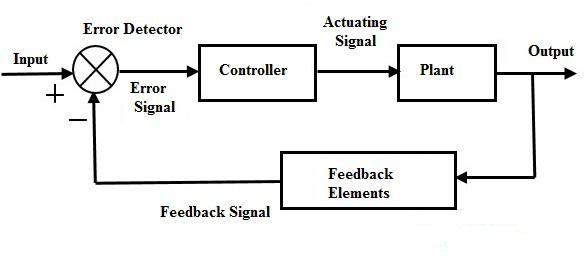
Trong sơ đồ trên, bộ phát hiện lỗi tạo ra một tín hiệu lỗi, vì vậy đây là sự biến đổi của đầu vào cũng như tín hiệu phản hồi. Tín hiệu phản hồi này có thể nhận được từ các phần tử của phản hồi trong hệ thống điều khiển bằng cách coi đầu ra của hệ thống là đầu vào. Là một thay thế cho đầu vào, tín hiệu lỗi này có thể được đưa ra làm đầu vào của bộ điều khiển.
Do đó, bộ điều khiển tạo ra một tín hiệu kích hoạt để điều khiển nhà máy. Theo cách sắp xếp này, đầu ra của hệ thống điều khiển có thể được điều chỉnh tự động để có được đầu ra mong muốn.
Do đó, các hệ thống này còn có tên là hệ thống điều khiển tự động. Ví dụ tốt nhất về hệ thống điều khiển vòng kín là hệ thống điều khiển đèn giao thông bao gồm một cảm biến ở đầu vào.
Các loại hệ thống kiểm soát vòng lặp kín
Hệ thống điều khiển vòng kín được phân thành hai loại tùy thuộc vào bản chất của tín hiệu phản hồi như tín hiệu hồi tiếp dương và tín hiệu hồi tiếp âm.
Tín hiệu hồi tiếp dương
Hệ thống vòng kín bao gồm một tín hiệu phản hồi dương có thể được kết nối với đầu vào của hệ thống được gọi là hệ thống hồi tiếp dương. Hệ thống này còn được đặt tên là phản hồi tái tạo.
Ví dụ tốt nhất về phản hồi tích cực này trong các mạch điện tử là hoạt động của một bộ khuếch đại. Bởi vì vòng lặp này bằng cách kết nối một số phần của điện áp đầu ra với đầu vào của thiết bị đầu cuối không đảo qua một vòng phản hồi sử dụng điện trở.
Tín hiệu hồi tiếp âm
Hệ thống vòng kín bao gồm một tín hiệu phản hồi âm có thể được kết nối với đầu vào của hệ thống được đặt tên là hệ thống phản hồi âm. Những loại hệ thống này rất ổn định và cũng tăng cường sức mạnh.
Trong khi phản hồi tích cực có xu hướng dẫn đến sự không ổn định thông qua tăng trưởng theo cấp số nhân, dao động hoặc hành vi hỗn loạn, hồi tiếp âm thường thúc đẩy sự ổn định. Hồi tiếp âm có xu hướng thúc đẩy sự ổn định về trạng thái cân bằng và làm giảm tác động của sự nhiễu loạn. Các vòng hồi tiếp âm chỉ cần áp dụng lượng hiệu chỉnh phù hợp với thời gian tối ưu có thể rất ổn định, chính xác và nhanh nhạy.
Phản hồi âm được sử dụng rộng rãi trong kỹ thuật cơ khí và điện tử, cũng như và có thể được nhìn thấy trong nhiều lĩnh vực khác từ hóa học, kinh tế học đến các hệ thống vật lý như khí hậu. Hệ thống hồi tiếp âm nói chung được nghiên cứu trong kỹ thuật hệ thống điều khiển.
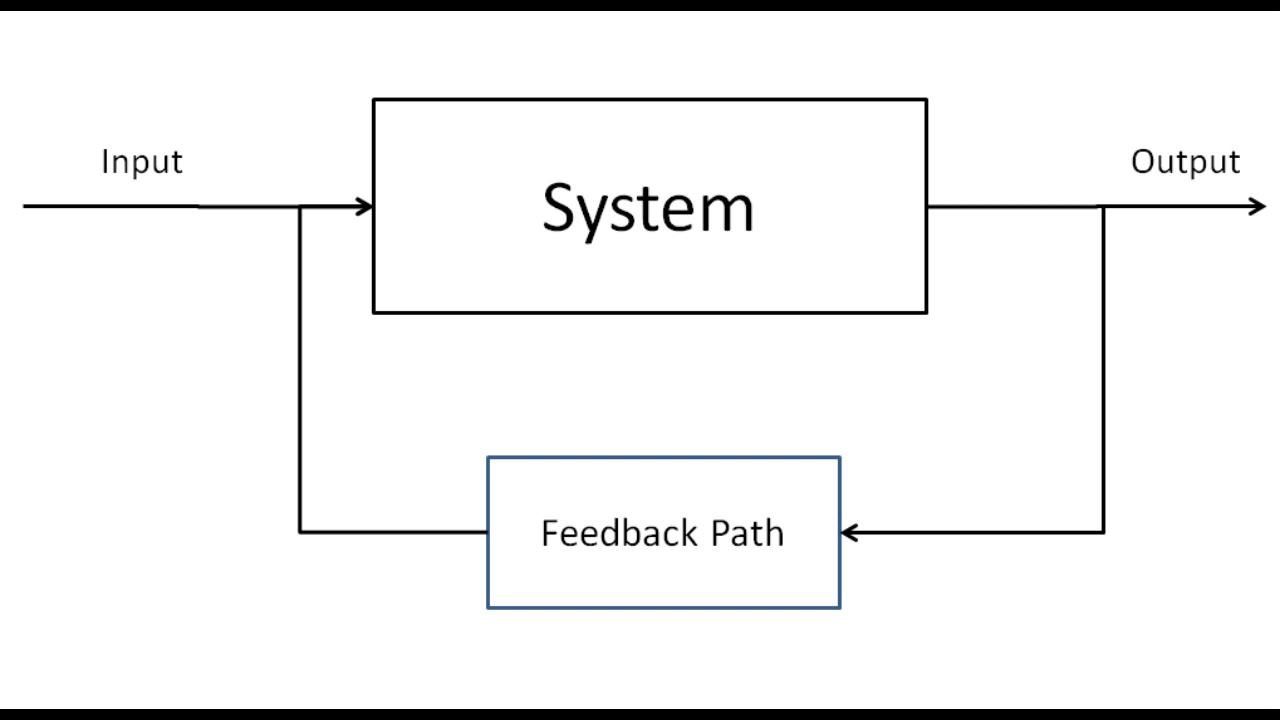
Chuyển đổi chức năng
Hành vi của hệ thống có thể được chỉ ra thông qua chức năng chuyển giao của nó. Nó có thể được định nghĩa là quan hệ toán học của đầu vào và đầu ra của hệ thống điều khiển. Hệ thống điều khiển có thể được tính toán thông qua tỷ số giữa output và input. Do đó, đầu ra của hệ thống điều khiển là sản phẩm của chức năng đầu vào & chuyển giao.

Ví dụ về hệ thống điều khiển vòng kín được hiển thị bên dưới.
Đối với hệ thống trên,
C (S) = E (S) * G (S)
E (S) = R (S) – H (S) * C (S)
Thay thế giá trị E (S) này bằng C (S), sau đó chúng ta có thể nhận được
C (S) = [R (S) – H (S) * C (S)] * G (S)
C (S) = R (S) G (S) – H (S) * C (S) * G (S)
Từ phương trình trên
R (S) G (S) = C (S) + H (S) * C (S) * G (S)
R (S) G (S) = C (S) [1 + H (S) * G (S)]
C (S) / R (S) = G (S) / [1 + H (S) * G (S)]
Đây là chức năng chuyển giao của hệ thống này với phản hồi tiêu cực. Tương tự, đối với phản hồi tích cực, phương trình hàm truyền có thể được viết dưới dạng
C (S) / R (S) = G (S) / [1 – H (S) * G (S)]
Ví dụ về hệ thống điều khiển vòng kín
Hiện tại cùng với sự phát triển công nghệ, thì có nhiều loại thiết bị điện- điện tử sử dụng hệ thống điều khiển vòng kín. Tiêu biểu như một số ví dụ sau đây mà chắc chúng ta cũng đã biết và quá quen thuộc với nó. Ví dụ như:
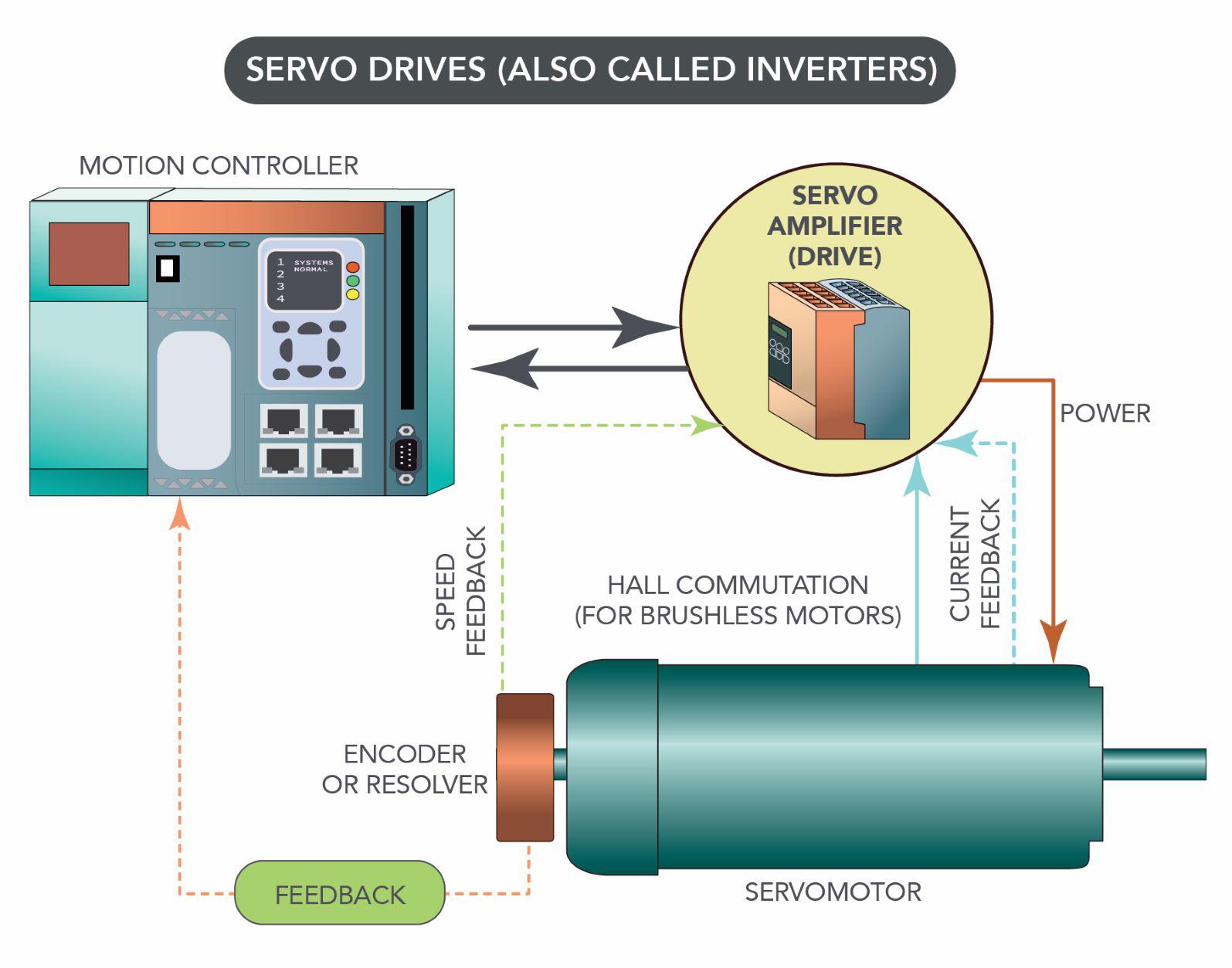
- Trên servo, có thể đạt được sự ổn định điện áp bằng cách đưa ra phản hồi điện áp đầu ra cho hệ thống
- Trong bộ điều khiển mực nước, mức nước có thể được quyết định bởi nước đầu vào thông qua các cảm biến đo mức nước
- Hệ thống tự điều chỉnh nhiệt độ của phòng.
- Tốc độ động cơ có thể được kiểm soát bằng cách sử dụng máy đo tốc độ hoặc cảm biến dòng, nơi cảm biến phát hiện tốc độ động cơ và gửi phản hồi đến hệ thống điều khiển để thay đổi tốc độ của nó.
- Bàn ủi điện tự động có thể được điều khiển tự động bằng nhiệt độ của bộ phận làm nóng trong bàn ủi.
- Một số ví dụ khác về các hệ thống này bao gồm máy điều nhiệt, hệ thống năng lượng mặt trời, bệ phóng tên lửa, động cơ tự động, máy nướng bánh mì tự động, hệ thống điều khiển nước sử dụng tuabin.
Ưu điểm hệ thống điều khiển vòng kín
Những ưu điểm vượt trội của hệ thống điều khiển vòng kín mà chúng ta có thể kể tên như:
- Các hệ thống này rất chính xác và ít lỗi hơn
- Các lỗi có thể được sửa chữa thông qua tín hiệu phản hồi
- Băng tần cao
- Nó hỗ trợ tự động hóa tốt hơn
- Chúng không bị ảnh hưởng bởi nhiễu.
Nhược điểm của hệ thống điều khiển vòng kín
Tuy rằng hệ thống điều khiển vòng kín mang lại rất nhiều lợi ích. Nhưng không phải chúng không có nhược điểm. Và sau đây là một số nhược điểm hiện hữu của hệ thống:
- Việc thiết kế hệ thống này rất phức tạp
- Chi phí đầu tư xây dựng hệ thống rất đắt
- Bảo trì thường tốn công và cần thiết
- Hệ thống điều khiển dao động đôi khi do tín hiệu phản hồi
- Cần nhiều thời gian và công sức trong thiết kế và thử nghiệm hệ thống
Bài viết cung cấp cho các bạn kiến thức cơ bản nhất về hệ thống điều khiển vòng kín. Và đây là một câu hỏi dành cho bạn, “hệ thống điều khiển vòng hở là gì?”